
Rutgers Dynamics
The first student-run robotics lab.
Building robot dogs & humanoids.
Part of a collaboration with the Caltech Robotics Team and Columbia Robotics Club on hardware + ML.
Boldly go where no undergrad has gone before.
OBJECTIVE: DIY ROBOT DOG BY SUMMER 2026, ICRA IN VIENNA, AUSTRIA
V4 EXOSKELETON CHASSIS CO-DESIGNED W/ CALTECH ROBOTICS TEAM
DEVELOP WITH CUTTING-EDGE TECH.
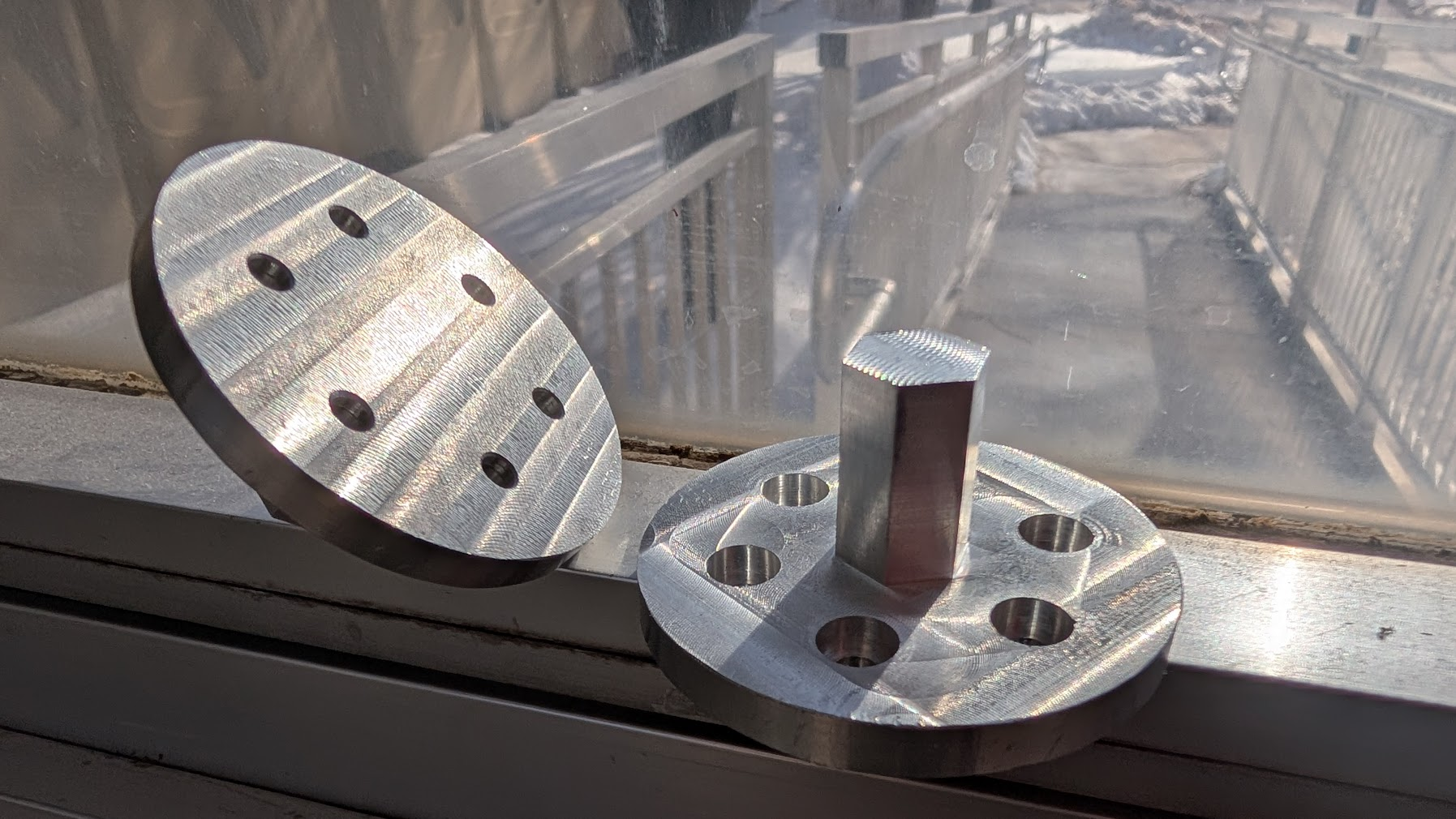
CNC MANUFACTURING
Mill, lathe, and wire-EDM — precision parts machined in-house from billet aluminum for our actuator housings and structural links.
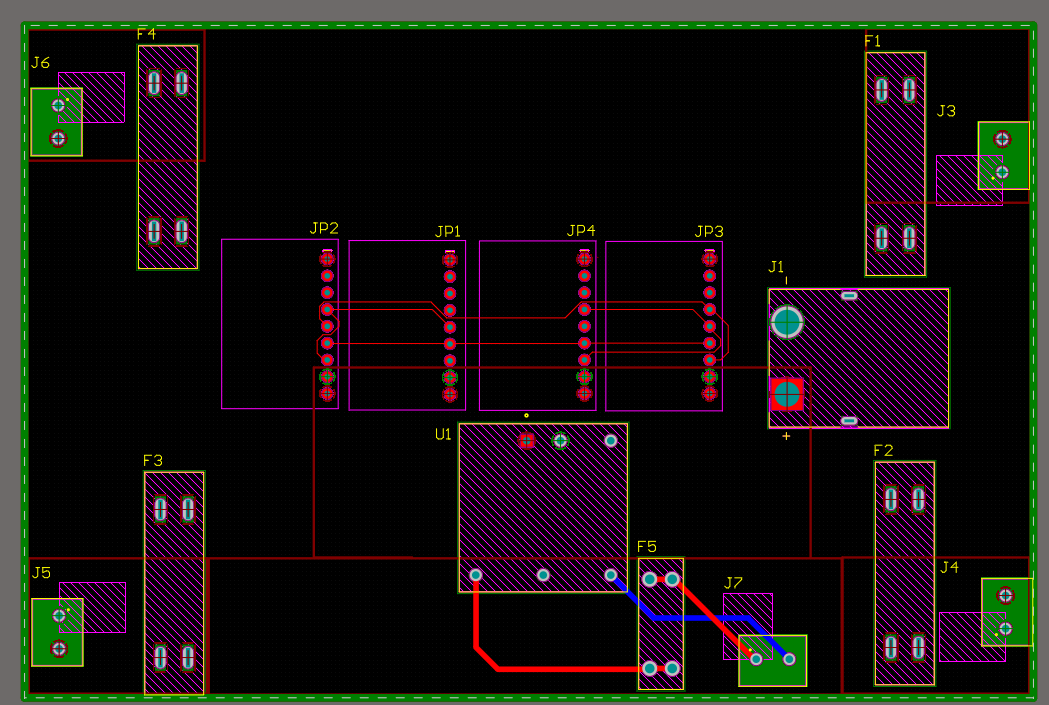
CUSTOM PCBS
Multi-layer motor driver boards, IMU breakouts, and CAN-bus backbone — all designed in KiCad and assembled by hand.
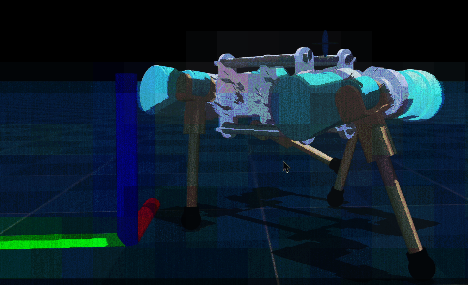
DEEP MACHINE LEARNING
RL locomotion policies trained in Isaac Gym, deployed zero-shot via sim-to-real transfer onto our custom quadruped platform.
// 3D_MODEL
Our Hardware
V4 EXOSKELETON CHASSIS CO-DESIGNED W/ CALTECH ROBOTICS TEAM
[ PARTNERS & AFFILIATES ]






Meet the Team
::